Общеизвестно о явлении резонанса напряжения и тока в электротехнике. В последовательной электрической схеме с индуктивностью и емкостью, при какой-то резонансной частоте наступает резонанс напряжения, в параллельной — резонанс тока. В последовательной схеме этому явлению соответствует условие равенства индуктивной и емкостной мощностей. Электрическая цепь становится чисто активным.
При увеличении частоты индуктивное сопротивление растет, а емкостное – уменьшается. При резонансной частоте индуктивная и емкостная мощности равны и взаимно компенсируют друг друга, и наступает режим резонанса напряжения. Аналогичное явление происходит и при изменении тока в линии электропередачи. При какой-то нагрузке (токе) на ней наступает режим резонанса напряжения. Он имеет место при равенстве генерируемой емкостной и потребляемой индуктивной мощностей. Мощность, соответствующая этому условию, как было сказано выше, называют «натуральной».
Расчеты показывают, что при резонансной частоте также имеет место равенство емкостной и индуктивной мощностей в последовательной схеме.
Физика явления резонанса напряжения в последовательной схеме с индуктивностью и емкостью и в линии имеет одинаковое объяснение – это равенство индуктивного и емкостного мощностей.
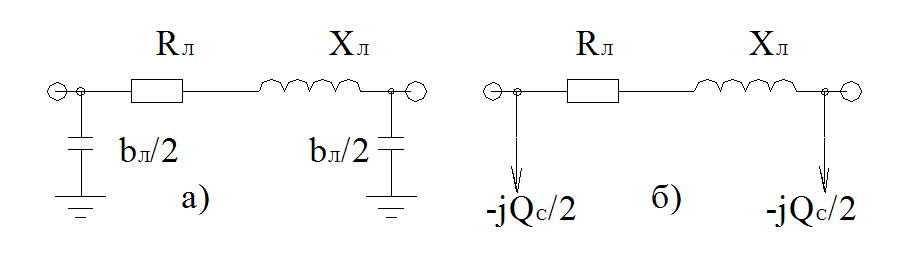
Используются различные схемы замещения линий. В учебниках приводятся следующие схемы замещения. Кабельная линия Uн≤10 кВ представлена только активным сопротивлением, воздушная линия Uн≤35 кВ — активным и индуктивным сопротивлением, воздушная линия 110-330 кВ — активным и индуктивным сопротивлением и емкостной проводимостью
(рис.6.3.1,а) или вместо емкостной проводимости учитывается реактивная мощность, генерируемая емкостью линии (рис.6.3.1,б). В этих схемах замещения реактивная проводимость или реактивная мощность приняты сконцентрированными и приложенными по половине в начале и в конце линии.

Рис. 6.3.1
Для линий сверхвысокого напряжения Uн 330 кВ при длине более 300-400 км для составления схемы замещения предлагается учитывать равномерное распределение сопротивлений и проводимостей вдоль линии.

Рис. 6.3.2.
Расчеты по схемам замещения для линий электропередачи дают результаты, резко отличающиеся от расчетных данных по схеме замещения (рис.6.3.1а и 6.3.1б.). Причина в том, что в передаче переменного тока очень незначительны поперечные активная и емкостная проводимости и почти нет фазовых сдвигов и затухания.
Нами предлагается для составления схемы замещения линии электропередачи емкость линии принимать как последовательно включенный элемент. Обоснованием для этого является физика процесса резонанса на линии, который представляет собой резонанс напряжений. Момент резонанса соответствует режиму равенства нагрузки линии натуральному (S = SНАТ), при котором имеет место равенство емкостного и индуктивного мощностей ().
Как известно, согласно законам электротехники, такой режим имеет место в последовательной схеме (рис. 6.3.3).

Рис. 6.3.3
При рассмотрении баланса реактивных мощностей не имеет значения способ включения источников реактивных мощностей (конденсаторов или других компенсирующих устройств): параллельное или последовательное. Линия, генерирующая реактивные мощности, может быть представлена как последовательно включенные емкостные и индуктивные источники. В схемах замещения (рис.6.3.4а и 6.3.4б) представлены просуммированные результаты реактивных сопротивлений.
Как нами было рассмотрено выше, линия сильно меняет свои свойства в зависимости от нагрузки. При Р < РНАТ в линии преобладает емкостная мощность, ей соответствует емкостное сопротивление и линия может быть замещена схемой (рис.6.3.4.а).
При S = SНАТ схема замещения будет состоять только из активного сопротивления (рис.6.3.4.б).
При нагрузке S > SНАТ в линии преобладает индуктивная мощность, ей соответствует индуктивное сопротивление Хл и схема замещения будет выглядеть как на рис. 6.3.4.в.

Рис. 6.3.4.
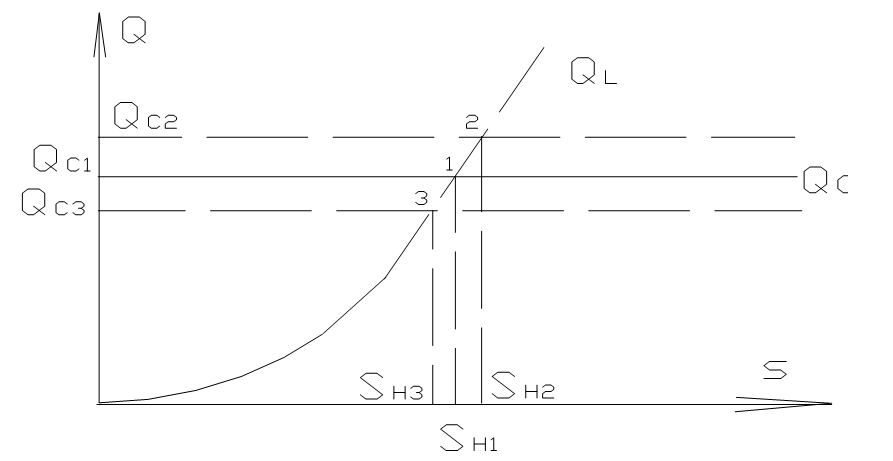
Подытоживая выше сказанное, можно сказать следующее: баланс реактивных мощностей на линии высокого напряжения сильно зависит от нагрузки. При малых передаваемых мощностях, на линии преобладает емкостная реактивная мощность, при натуральной мощности она равна 0, при больших мощностях на ней преобладает индуктивная реактивная мощность, соответственно линия должна иметь различную схему замещения.
Принятые схемы замещения линии сверхвысокого напряжения не соответствует реальному процессу в линии. Предлагается линию замещать последовательно включенными сопротивлениями. Правильность такого предложения подтверждается наличием места в ней резонанса напряжения.
Содержание главы:
- 6.1. Реактивные мощности линии электропередачи
- 6.2. Натуральная мощность линии
- 6.3. О явлении резонанса напряжения и схемах замещения линии электропередачи
- 6.4. Расчет дальней сверхвысоковольтной линии электропередачи
- 6.5. О расчете межсистемной линии или работающей на шины бесконечной мощности
- 6.6. Общепринятый метод расчета режимов линии электропередачи
- 6.7. Величина и направления потоков реактивной мощности на линии
- 6.8. Расчет режимов линии с учетом баланса реактивных мощностей
- 6.9. Пример расчета линии по методу баланса реактивной мощности
- 6.10. Расчет линии при обратном потоке реактивной мощности от конца к началу
- 6.11. Зависимость реактивных мощностей линии и уровня напряжения на конце радиальной линии от нагрузки
- 6.12. Расчет падения и потери напряжения в линии электропередачи
Содержание книги:
- О теориях генерации, передачи электроэнергии и реактивной мощности
- Введение
- Глава 1. О теории генерации электрической энергии
- Глава 2. Теории электропередачи
- 2.1. Теория передачи энергии путем взаимного превращения электрического и магнитного полей
- 2.2. Теория переноса электрической энергии вдоль проводов.
- 2.3. Теории передачи электрической энергии электронной проводимостью
- 2.4. Теория передачи электромагнитными волнами (Волновая теория)
- 2.5. О теории прямой и обратной волны
- Глава 3. О теории электрических цепей
- Глава 4. Теория о реактивной мощности
- 4.1. Источники и потребители реактивной мощности
- 4.1.1 Синхронные генераторы
- 4.1.2 Роль электрических станций в выработке реактивной мощности
- 4.1.3. Роль электростанций в потреблении реактивной мощности
- 4.1.4. Синхронные компенсаторы (СК)
- 4.1.5. Батареи конденсаторов (БК)
- 4.1.6. Шунтирующие реакторы (ШР)
- 4.1.7. Силовые трансформаторы
- 4.1.8. Электродвигатели
- 4.1. Источники и потребители реактивной мощности
- Глава 5. О теории устойчивости линии
- Глава 6. Расчет режимов линии электропередачи
- 6.1. Реактивные мощности линии электропередачи
- 6.2. Натуральная мощность линии
- 6.3. О явлении резонанса напряжения и схемах замещения линии электропередачи
- 6.4. Расчет дальней сверхвысоковольтной линии электропередачи
- 6.5. О расчете межсистемной линии или работающей на шины бесконечной мощности
- 6.6. Общепринятый метод расчета режимов линии электропередачи
- 6.7. Величина и направления потоков реактивной мощности на линии
- 6.8. Расчет режимов линии с учетом баланса реактивных мощностей
- 6.9. Пример расчета линии по методу баланса реактивной мощности
- 6.10. Расчет линии при обратном потоке реактивной мощности от конца к началу
- 6.11. Зависимость реактивных мощностей линии и уровня напряжения на конце радиальной линии от нагрузки
- 6.12. Расчет падения и потери напряжения в линии электропередачи
- Глава 7. Управление уровнем напряжения с помощью ГЭС и компенсацией реактивной мощности на ней
- 7.1. Использование ГЭС для регулирования напряжения в энергосистеме
- 7.2. Усиление эффекта регулирования напряжения с помощью ГЭС за счет изменения реактивной мощности на линии
- 7.3. Расчеты уровней напряжения на примере линии «Токтогульская ГЭС — п/с Фрунзенская»
- 7.4. Режимы работы элементов линии 500кВ на примере электропередач от Токтогульской ГЭС
- Заключение
- Список литературы

















 Синусоиду, полученную по формуле (5.2) можно принять за синусоиду однофазного генератора.
Синусоиду, полученную по формуле (5.2) можно принять за синусоиду однофазного генератора.